![]()
業務用ドライブレコーダ・自動車機器の開発・販売

お知らせ・ニュースリリース
ニュース一覧- 2024.3.8
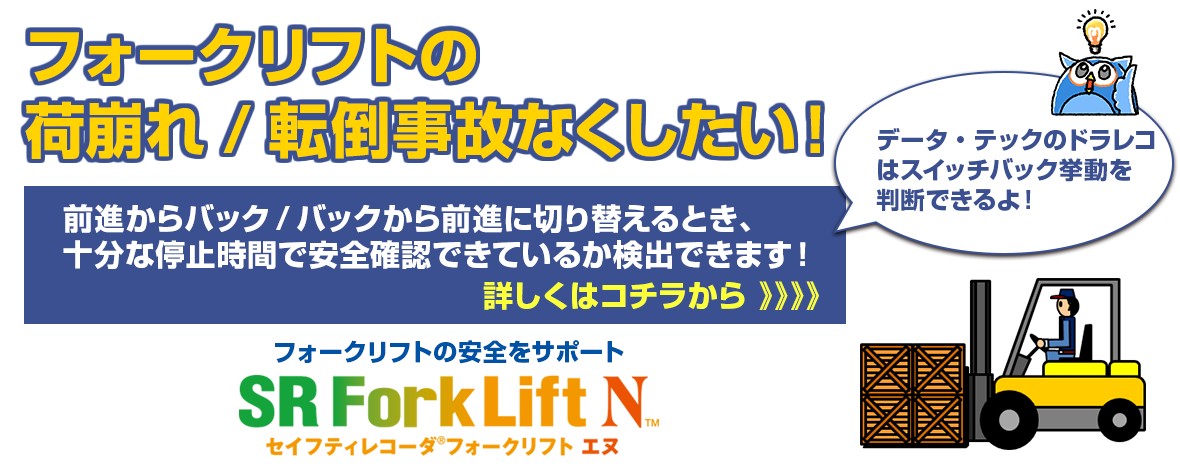
- SRForkLift Nの既存カメラ販売終了と後継カメラのご案内
- 2024.3.8
- 「フォークリフトの達人」Windows 11 PCでのご利用について
更新情報
- 2024.3.1
- SR NEWS vol.77が発行されました!
直近の更新情報はありません
製品情報
製品一覧










スペシャルコンテンツ情報




![]()
業務用ドライブレコーダ・自動車機器の開発・販売